Základní pojmy: PPM, CPPM, PWM, PCM a S.BUS
Z Wiki OpenTX
Rozpracováno.
PCM = pulse code modulation (pulsně-kódová modulace) PPM = pulse position modulation (pulsně-polohová modulace) PAM = pulse amplitude modulation (pulsně amplitudová modulace) PWM = pulse width modulation (pulsně-šířková modulace)
Tyto zkratky označují způsob zakódování údajů o výchylkách v signálu, přenášeném mezi vysílačem a přijímačem, případně mezi přijímačem a servy.
PAM
Historicky zřejmě prvním způsobem kódování byla PAM. Kódování spočívá v prostém ovzorkování hodnoty přenášeného signálu v pravidelných intervalech. Amplituda přenášených impulsů odpovídá hodnotě přenášené veličiny v době trvání vzorkovacích impulsů. Tento způsob je velmi náchylný na chyby způsobené zkreslením signálu při přenosu. V moderní RC technice se nepoužívá.
PWM
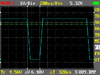
PWM kóduje přenášenou veličinu jako šířku impulsu. Větší hodnotě přenášené veličiny odpovídá větší šířka impulsu. V RC technice je PWM využíváno pro komunikaci se servy a regulátory elektromotorů.
The way we relay data to a servo for instance is the time the pulse is on. In the case of R/C electronics this time is usually around 1-2 milliseconds. A servo or ESC will monitor this pulse and begin counting when the pulse is detected and stop counting when the pulse stops. The time the pulse is on will determine the servo position. For example, sending a servo a 1ms pulse will make the servo swing completely left while a 2ms pulse will swing the arm completely right.
Generally in R/C equipment an entire PWM pulse will last a total of 20ms. The entire pulse is called a frame. A complete frame will include both the time the pulse is high (1-2ms) and the time the pulse is low.
Although the frame lasts 20ms the important part of the pulse is the time the pulse is on; 1-2ms. Although the time between pulses is not as important it does play an important role. Usually keeping the time between pulses around 20ms is best. If the delay is longer, a servo for example will lose holding power. A pulse can be generated much faster but 20ms is best for most situations.
PPM
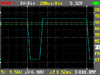
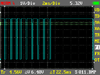
PPM kóduje hodnotu jako polohu impulsu konstantní šířky ve vymezeném časovém intervalu. V RC technice je nejběžnější rozsah intervalu, ve kterém se pohybuje impuls od 1ms do 2ms. Střední hodnota ("0") je 1,5ms. V PPM signálu může být (a v případě RC souprav je) zakódována hodnota několika veličin. Přenáší se postupně po sobě. Opakovací perioda klasického kompletního signálu PPM je zpravidla 22,5ms.
PPM basically is several PWM signals lined up back to back.
- Sample gallery
Titulek 1
Titulek 2
Titulek 2



PCM
PCM se od ostatních systémů přenosu (PPM, PWM a PAM) odlišuje mimo jiné způsobem, jak reaguje na zkreslení signálu.
When a PCM receiver gets the interference, the processor sees it as bad information and just holds everything where they were the last time good information was received. If the interference lasts more than a second or so, then the receiver will move the controls to postions selected by the modeler. That's what is meant by "failsafe". Sometimes, though, the failsafe doesn't do much good because the model's in a bad place when it gets "hit" and the failsafe can't prevent a crash in that case.
If a PPM receiver gets interference, the receiver will think the interference is part of the signal and send erratic information to the servos, which will cause them to act up. The model can have a little reaction as a slight 'bobble' or can have the servos jam over and the model wind up in the ground.
Usually, though, most interference is momentary, and it makes little difference which receiver you have, since the model will stay aloft long enough for you to save it when the interference is over. With PCM, though, the model will usually not jump around, but the modeler will notice that he's locked out of controlling the model. When the interference ends all control is regained.
R/C Devices that use PWM Pulses:
- Servos
- Electronic Speed Controllers
- R/C switches
- R/C lights
- R/C receivers
- Data loggers
- Failsafe's
- Autopilot/Stabilization systems
- Servo Controller
R/C Devices that use PPM Pulses:
- R/C transmitters
- R/C receivers
- Autopilot/Stabilization systems
- PCTx